What are the steps in the design process of a robot?
What are the steps in the design process of a robot?
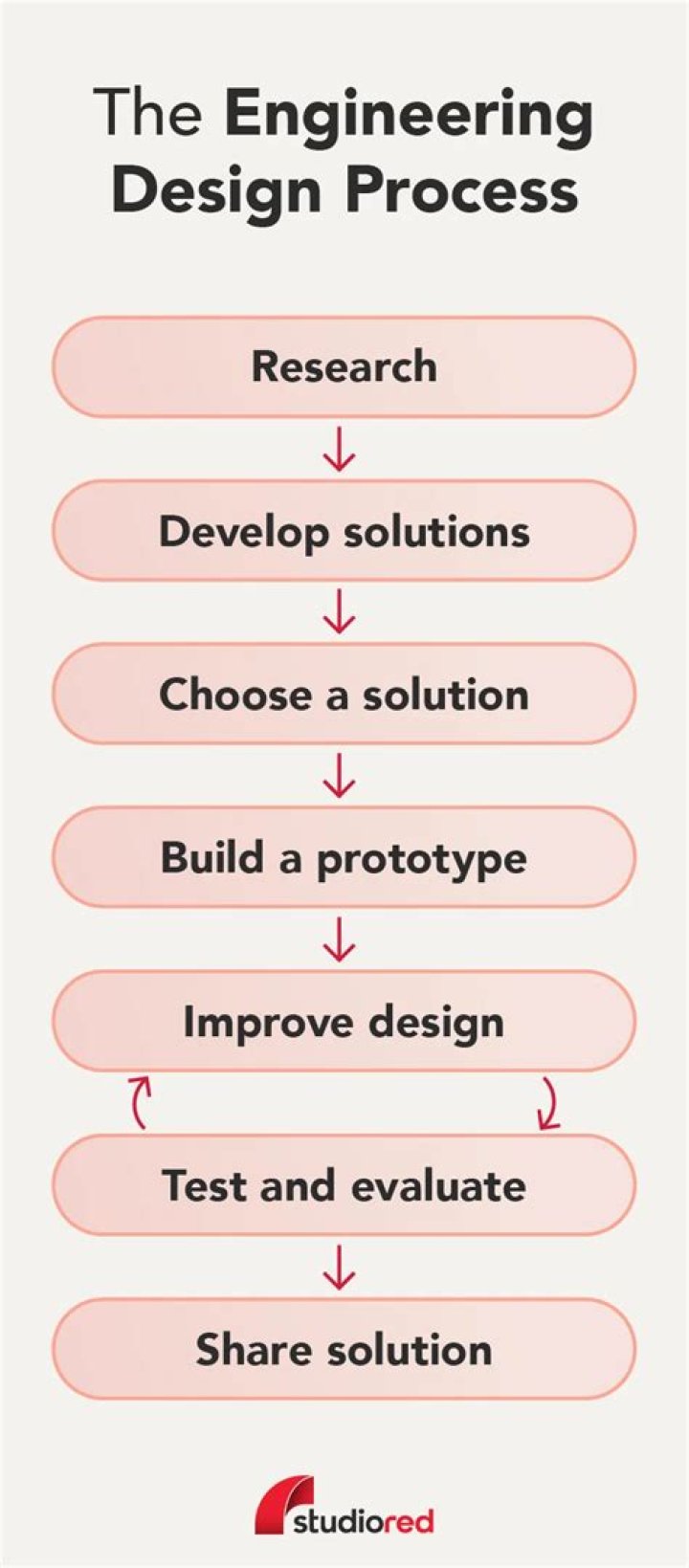
The Design Process
- Define the Problem.
- Do Background Research.
- Specify Requirements.
- Brainstorm Solutions.
- Choose the Best Solution.
- Do Development Work.
- Build a Prototype.
- Test and Redesign.
How does a pick and place robot work?
Pick and place robots are usually mounted on a stable stand, strategically positioned to reach their entire work envelope. Advanced vision systems enable them to grasp and move objects on a conveyor belt, which can be used in a variety of different ways.
What is the mechanical structure of a robot?
Mechanically, the manipulator is the main component of the robot. It is formed by a series of solid structural components or joints that allow a relative movement between every two consecutive links. The parts that make up the manipulator are called the body, arm, wrist and actuator (or terminal element).
What are the 5 types of robots changing manufacturing?
Here are five types of robotic technology that have changed and keep changing the manufacturing industry:
- Collaborative Robots.
- Autonomous Mobile Robots (ARMs)
- Industrial Robot Arms.
- Robots With Machine Vision.
- Robotic Blacksmithing.
What is design mechanical engineering?
Engineering design is the process of devising a system, component, or process to meet desired needs. Mechanical design means the design of components and systems of a mechanical nature—machines, products, structures, devices and instruments.
What is robot main design considerations?
Designing a robot requires balance between size (mostly weight), motor power and battery power. These three elements are connected with each other (more battery power increases the weight of the robot and requires stronger motors) and finding the “perfect” balance requires a lot of tweaking and experimenting.
How many degrees of freedom is required for a robot to pick and place a cylindrical object?
Since a rigid body in space has six degrees of freedom, the most general robots are designed to have six joints. This way, the end effector or the link that is furthest away from the base can be made to assume any position or orientation (within some range).
Which motion can occur in pick and place robot Mcq?
Explanation: None. Explanation: The fixed-sequence robot, also called a pick-and-place robot, is programmed for a specific sequence of operations. Its movements are from point to point, and the cycle is repeated continuously.
Which of the following type of robot is most suitable for pick and place operations?
Robotic arm – Robotic arms are the most common type of pick and place robots. A 5-axis robotic arm robot can be used for standard pick and place applications where objects are picked up and moved to other locations in a single plane.
What are the types of robots?
Generally, there are five types of robots:
- 1) Pre-Programmed Robots. Pre-programmed robots operate in a controlled environment where they do simple, monotonous tasks.
- 2) Humanoid Robots. Humanoid robots are robots that look like and/or mimic human behavior.
- 3) Autonomous Robots.
- 4) Teleoperated Robots.
- 5) Augmenting Robots.
How are robots changing manufacturing?
Robotics has changed how production is completed because robots are able to perform a task repetitively with precision tirelessly. The new manufacturing robots are more productive and use less energy to work, making them more efficient, effective, and minimizing waste. Robotics in manufacturing continues to grow.